HW 2.21
By Nasser Abbasi
SOURCE CODE
function nma_pendul
%
nma_pendul - Program to determine effect of pivot driving
%
accelration on the oscillation of the pendulum.
% Nasser
Abbasi, HW 6, problem 2.22
%
Modified from the original pendul.m program by Dr Garcia.
%
clear all; help nma_pendul % Clear the memory and print
header
%* Set
initial position and velocity of pendulum
theta0 = input('Enter initial angle (in degrees): ');
theta = theta0*pi/180; % Convert angle to radians
tau = input('Enter
time step: ');
Td = input('Enter
Td, the driving period (sec):');
initial_A= input('Enter the initial A to use (multiples of g):');
last_A = input('Enter
the maximum A to use (multiples of g):');
%* Loop
over desired number of steps with given time step
nstep = input('Enter number of time steps: ');
%
% Run
the simulation for different A, the amplitude of the
%
driving accelaration, and plot the result for each run to
% see
the effect of increasing A on the oscillation of the
%
pendulum.
%
for(A=
initial_A : 5 : last_A)
simulate(A,theta,tau,Td,nstep);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
Function to run the simulation for different
% values
of A, with everything else fixed to see
% the
effect of changing A.
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function simulate(A,theta,tau,Td,nstep)
omega = 0; % Set the initial
velocity
%* Set
the physical constants and other variables
time = 0; % Initial time
irev = 0; % Used to count number of reversals
%* Take
one backward step to start Verlet
accel = - getAccelaration( time, A, Td,
theta); %
Gravitational accel
theta_old = theta -
omega*tau + 0.5*tau^2*accel;
for istep=1:nstep
%* Record angle and time for
plotting
t_plot(istep) = time;
th_plot(istep) = theta*180/pi;
% Convert angle to degrees
time = time + tau;
%* Compute new position and
velocity using Verlet method
accel = - getAccelaration(
time, A, Td, theta);
theta_new = 2*theta - theta_old + tau^2*accel;
theta_old = theta;
theta =
theta_new;
end
%* Graph
the oscillations as theta versus time
figure;
plot(t_plot,th_plot,'+');
xlabel('Time');
ylabel('\theta (degrees)');
title(sprintf('Oscillation for initial angle=%d (degree), A0=%d',
...
th_plot(1), A));
drawnow;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
function to find the accelatation from
%
% 2*PI*time
% g (1 + A
Sin(------------) )
% Td
% ------------------------------ Sin (theta)
% L
%
%%%%%%%%%%%%%%%%%%%%%%%%%%
function w=getAccelaration(time,A,Td,theta)
%
notice, g/L is taken as 1
w= 1 + A*sin(2*pi*time/Td) ;
w= w * sin(theta);
Analysis
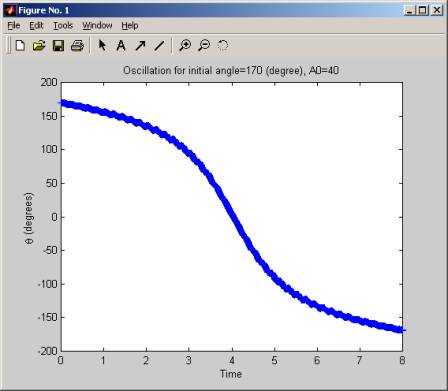
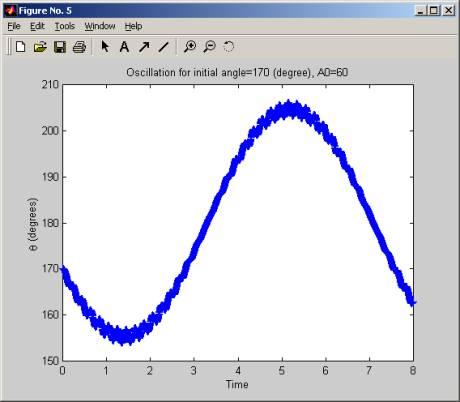
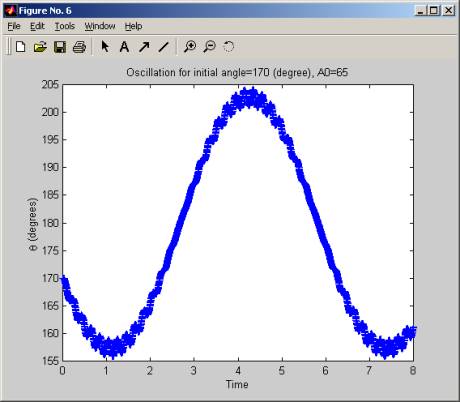
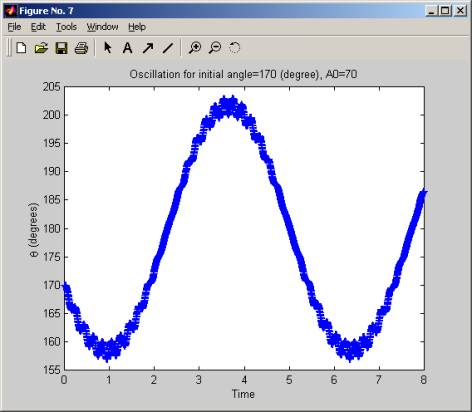
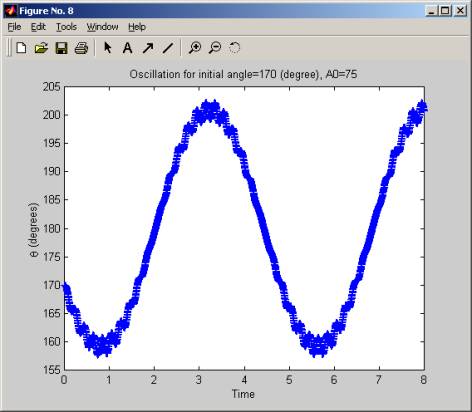
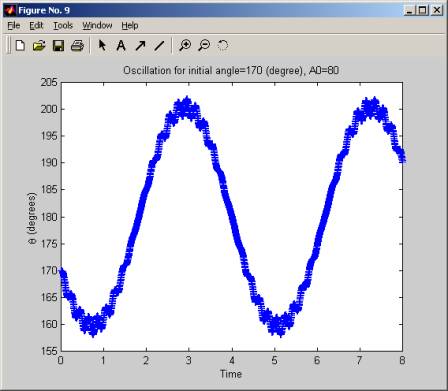
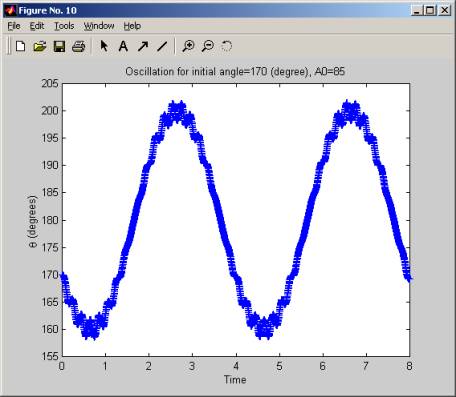
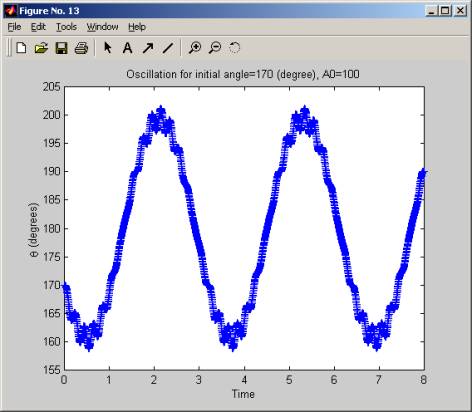
The simulation was started with a large fixed initial angle (170 degrees), then A, the amplitude of the acceleration of the pivot holding the pendulum was increased slowly, (in increment of 5 g), and for each value of A, we plot the oscillation of the pendulum. We see that for low values of A, the pendulum is not stable, but when A crosses over the value of 55g to 60g the pendulum start to oscillate around the initial angle. As A is increased more, this oscillation become more frequent and at A of 100g, the pendulum makes a little over 2 full swings in 8 seconds. The range of the oscillation (the angle over which it swings remains the same, which is from about 160 degrees to 200 degrees, but the frequency increases as A increases.
In these diagrams below, time is in seconds.
RUN OUTPUT
» clear all
» close all
» help nma_pendul
nma_pendul - Program to determine effect of pivot driving
accelration on the oscillation of the pendulum.
» nma_pendul
nma_pendul - Program to determine effect of pivot driving
accelration on the oscillation of the pendulum.
Enter initial angle (in degrees): 170
Enter time step: 0.004
Enter Td, the driving period (sec):0.2
Enter the initial A to use (multiples of g):40
Enter the maximum A to use (multiples of g):100
Enter number of time steps: 2000