HOME
HW 3 Mathematics 503, Mathematical Modeling, CSUF
June 2 2007
Nasser M. Abbasi
October 8, 2025
Contents
1 Problem 1 (section 1.3,#1, page 40)
problem: Find the general solution of the following differential equations
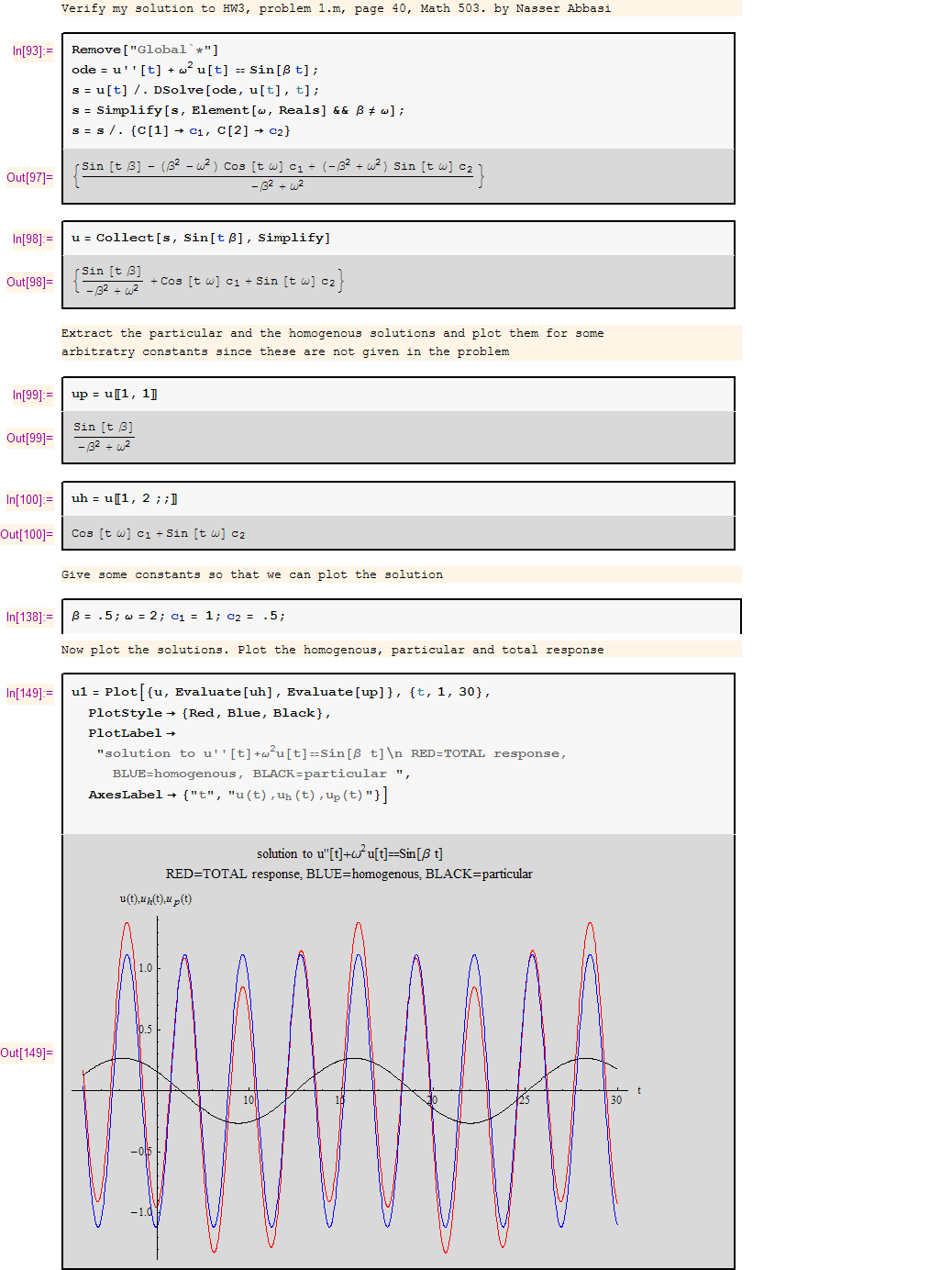
(m) \(u^{\prime \prime }+\omega ^{2}u=\sin \beta t\), \(\omega \neq \beta \)
solution:
We start by assuming \(\omega \) is real, hence \(\omega ^{2}\) must be positive.
Now, the general solution is
\begin{align*} u\left ( t\right ) & =u_{h}\left ( t\right ) +u_{p}\left ( t\right ) \\ & =c_{1}u_{1}\left ( t\right ) +c_{2}u_{2}\left ( t\right ) +u_{p}\left ( t\right ) \end{align*}
Where \(u_{1}\left ( t\right ) ,u_{2}\left ( t\right ) \) are the 2 independent solutions of the homogeneous differential equation
\[ u^{\prime \prime }+\omega ^{2}u=0 \]
and \(u_{p}\left ( t\right ) \) is the
particular solution.
To find \(u_{1}\left ( t\right ) \) and \(u_{2}\left ( t\right ) \), we assume the homogeneous solution is \(u_{h}\left ( t\right ) =Ae^{mt}\) for some constants \(A,m\) and substitute this
assumed solution in the ODE. We obtain the characteristic equation \(Am^{2}e^{mt}+\omega ^{2}Ae^{mt}=0\rightarrow m^{2}+\omega ^{2}=0\rightarrow m^{2}=-\omega ^{2}\) or \(m=\pm i\omega \), hence \(u_{1}\left ( t\right ) =A_{1}e^{i\omega t}\) and
\(u_{2}\left ( t\right ) =A_{2}e^{-i\omega t}\).
Since the homogeneous solution is a linear combination of all the independent solutions, we take
the sum and the difference of these solutions, and using Euler relation which converts the complex
exponential to the trigonometric \(\sin \) and \(\cos \) functions we obtain
\begin{align*} u_{1}\left ( t\right ) & =\cos \omega t\\ u_{2}\left ( t\right ) & =\sin \omega t \end{align*}
and we now write
\[ u_{h}\left ( t\right ) =c_{1}\cos \omega t+c_{2}\sin \omega t \]
Now to obtain \(u_{p}\left ( t\right ) \), we use the method of undetermined coefficients. Assume
\[ u_{p}\left ( t\right ) =a\cos \beta t+b\sin \beta t \]
and plug into the
original ODE, we obtain
\begin{align*} \left ( a\cos \beta t+b\sin \beta t\right ) ^{\prime \prime }+\omega ^{2}\left ( a\cos \beta t+b\sin \beta t\right ) & =\sin \beta t\\ \left ( -\beta a\sin \beta t+\beta b\cos \beta t\right ) ^{\prime }+\omega ^{2}\left ( a\cos \beta t+b\sin \beta t\right ) & =\sin \beta t\\ \left ( -\beta ^{2}a\cos \beta t-\beta ^{2}b\sin \beta t\right ) +\omega ^{2}\left ( a\cos \beta t+b\sin \beta t\right ) & =\sin \beta t\\ \left ( -\beta ^{2}a+\omega ^{2}a\right ) \cos \beta t+\left ( -\beta ^{2}b+\omega ^{2}b\right ) \sin \beta t & =\sin \beta t \end{align*}
Hence by comparing coefficients we obtain
\begin{align*} a\left ( \omega ^{2}-\beta ^{2}\right ) & =0\\ b\left ( \omega ^{2}-\beta ^{2}\right ) & =1 \end{align*}
Since \(\omega \neq \beta \) (given), then \(\omega ^{2}-\beta ^{2}\neq 0\,\), hence this must mean the following
\begin{align*} a & =0\\ b & =\frac {1}{\omega ^{2}-\beta ^{2}}\end{align*}
Therefor, the particular solution now can be written as
\begin{align*} u_{p} & =b\sin \beta t\\ & =\frac {\sin \beta t}{\omega ^{2}-\beta ^{2}}\end{align*}
Hence the general solution, which is \(y\left ( t\right ) =y_{h}\left ( t\right ) +y_{p}\left ( t\right ) \) is given by
\[ \fbox {$y\left ( t\right ) =c_{1}\cos \omega t+c_{2}\sin \omega t+\frac {\sin \beta t}{\omega ^{2}-\beta ^{2}}$}\]
Where \(c_{1}\) and \(c_{2}\) are constants that can be found from the initial conditions.
2 Problem 2 (section 1.3,#1, page 40)
problem: Find the general solution of the following differential equations
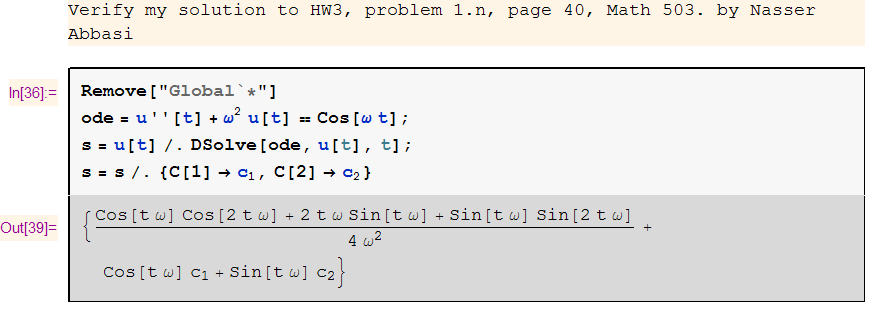
(n) \(u^{\prime \prime }+\omega ^{2}u=\cos \omega t\)
solution:
First, let the forcing function be called \(f\left ( t\right ) \), hence \(f\left ( t\right ) =\cos \omega t\) in this example.
From (m) we found the homogeneous solution to be \(u_{h}\left ( t\right ) =c_{1}u_{1}\left ( t\right ) +c_{2}u_{2}\left ( t\right ) \) where
\[ u_{1}\left ( t\right ) =\cos \omega t \]
and
\[ u_{2}\left ( t\right ) =\sin \omega t \]
Now to find the particular solution we can not use the method of undetermined coefficients since
the forcing frequency is the same as the undamped natural frequency of the system \(\omega \) and
this will lead to the denominator going to zero. Hence use the method of variation of
parameters which is a general method to find particular solution which will work with this
case.
\[ u_{p}\left ( t\right ) =-u_{1}\left ( t\right ) \int \frac {u_{2}\left ( t\right ) f\left ( t\right ) }{W}dt+u_{2}\left ( t\right ) \int \frac {u_{1}\left ( t\right ) f\left ( t\right ) }{W}dt \]
Where \(W\) is the Wronskian of \(u_{1},u_{2}\) given by \(W=u_{1}u_{2}^{\prime }-u_{2}u_{1}^{\prime }\)
Hence \(W\left ( t\right ) =\cos \omega t\left ( \omega \cos \omega t\right ) -\sin \omega t\left ( -\omega \sin \omega t\right ) =\omega \left ( \cos ^{2}\omega t+\sin ^{2}\omega t\right ) =\omega \)
Hence
\begin{align*} u_{p}\left ( t\right ) & =-\frac {\cos \omega t}{\omega }\int \sin \left ( \omega t\right ) f\left ( t\right ) dt+\frac {\sin \omega t}{\omega }\int \cos \left ( \omega t\right ) f\left ( t\right ) dt\\ & =-\frac {\cos \omega t}{\omega }\int \sin \left ( \omega t\right ) \cos \left ( \omega t\right ) dt+\frac {\sin \omega t}{\omega }\int \cos \left ( \omega t\right ) \cos \left ( \omega t\right ) dt\\ & =I_{1}+I_{2}\end{align*}
We now evaluate \(I_{1}\) and \(I_{2}\). Start with the easy one, \(I_{2}\)
\begin{align*} I_{2} & =\frac {\sin \omega t}{\omega }\int \cos \left ( \omega t\right ) \cos \left ( \omega t\right ) dt\\ & =\frac {\sin \omega t}{\omega }\int \cos ^{2}\left ( \omega t\right ) dt\\ & =\frac {\sin \omega t}{\omega }\left ( \frac {1}{4\omega }\left ( \sin 2t\omega +2t\omega \right ) \right ) \\ & =\frac {\sin \omega t}{4\omega ^{2}}\left ( \sin 2t\omega +2t\omega \right ) \end{align*}
and now \(I_{1}\)
\[ I_{1}=-\frac {\cos \omega t}{\omega }\int \sin \left ( \omega t\right ) \cos \left ( \omega t\right ) dt \]
We can use integration by parts (do it twice) or use an trigonometric identity. From tables, Using
the formula of
\[ 2\sin \left ( \frac {\lambda +\zeta }{2}\right ) \cos \left ( \frac {\lambda -\zeta }{2}\right ) =\sin \left ( \lambda \right ) +\sin \left ( \zeta \right ) \]
so if we let \(\lambda =2\omega t\) and \(\zeta =0\) we obtain the integrand above, hence
\[ 2\sin \left ( \omega t\right ) \cos \left ( \omega t\right ) =\sin \left ( 2\omega t\right ) \]
Substitute into \(I_{1}\)
\begin{align*} I_{1} & =-\frac {\cos \omega t}{\omega }\int \frac {1}{2}\sin \left ( 2\omega t\right ) dt\\ & =-\frac {\cos \omega t}{2\omega }\left ( \frac {-1}{2\omega }\cos \left ( 2\omega t\right ) \right ) \\ & =\frac {\cos \omega t}{4\omega ^{2}}\cos \left ( 2\omega t\right ) \end{align*}
Therefor
\begin{align*} u_{p}\left ( t\right ) & =I_{1}+I_{2}\\ & =\frac {\cos \omega t}{4\omega ^{2}}\cos \left ( 2\omega t\right ) +\frac {\sin \omega t}{4\omega ^{2}}\left ( \sin 2\omega t+2\omega t\right ) \\ & =\frac {\cos \left ( \omega t\right ) \cos \left ( 2\omega t\right ) +\sin \omega t\left ( \sin 2\omega t+2\omega t\right ) }{4\omega ^{2}}\end{align*}
Hence the general solution is
\begin{align*} u\left ( t\right ) & =c_{1}u_{1}\left ( t\right ) +c_{2}u_{2}\left ( t\right ) +u_{p}\left ( t\right ) \\ & =c_{1}\cos \omega t+c_{2}\sin \omega t+\frac {\cos \left ( \omega t\right ) \cos \left ( 2\omega t\right ) +\sin \omega t\left ( \sin 2\omega t+2\omega t\right ) }{4\omega ^{2}}\end{align*}
Verify using Mathematica